บทที่ 6
เครื่องมือวัดแบบดิจิตอล
ดิจิตอลมัลติมิเตอร์ (Digital Multi meter: DMM)
เครื่องวัดแบบดิจิตอลมีข้อดีหลายประการเมื่อเทียบกับชนิดแอนะลอก เช่น ในด้านความเร็ว ความเที่ยงตรง ความละเอียด ลดความผิดพลาดของผู้ใช้ มีฟังก์ชั่นต่างๆ ให้เลือก
มากมีระบบป้องกันวงจรภายในดี มีค่าความต้านทานภายอินพุตสูงไม่โหลดวงจร ดิจิตอลมัลติมีเตอร์ มีโครงสร้างภายในจะมีดิจิตอลโวลท์มิเตอร์มอดูล ที่สามารถวัดแรงดันไฟตรงได้
+200mV ดังนั้นเครื่องมือวัดแบบดิจิตอลจะสามารถวัดสัญญาณอะไรก็ได้ ก็ขึ้นอยู่กับตัวแปลงผันที่จะเปลี่ยนสัญญาณที่จะวัด ให้กลายเป็นแรงดันที่เหมาะสมป้อนให้กับโมดูล
ศัพท์ที่เกี่ยวกับคุณสมบัติของ DMM
1. จำนวนหลัก (number of Digits)
DMM ขนาด 4 หลัก จะอ่านได้สูงสุดได้ 9999 ที่มีหลักซึ่งแสดงตัวเลขน้อยกว่า 9 เรียกว่ามี OVER RANG เช่น DDM 4 หลักครึ่ง อ่านได้ 19999 และถ้าจะสามารถ
อ่านได้สูงเกิน 200% จะเปลี่ยนจาก ½ เป็น ¾ หลัก
ตัวอย่าง.
DMM ขนาด 3 ½ หลัก แสดงผลได้ 1999 (มี 2,000หน่วยนับ)
DMM ขนาด 3 ¾ หลัก แสดงผลได้ 3999 (มี 4,000หน่วยนับ)
DMM ขนาด 4 หลัก แสดงผลได้ 9999 (มี 10,000หน่วยนับ)
DMM ขนาด 4 ½ หลัก แสดงผลได้ 19999 (มี 20,000หน่วยนับ)
DMM ขนาด 5 ½ หลัก แสดงผลได้ 199999(มี 200,000หน่วยนับ)
DMM ขนาด 6 ½ หลัก แสดงผลได้ 1999999 (มี 2,000,000หน่วยนับ)
DMM ขนาด 7 ½ หลัก แสดงผลได้ 19999999(มี 20,000,000หน่วยนับ)
2. ความสามารถแยกแยะ (resolution) เป็นตัวเลขอัตราส่วนระหว่างตัวเลขที่น้อยที่สุดที่แสดงได้ กับตัวเลขสูงสุดที่แสดงได้บนสเกลเดียวกัน เช่น DMM 3 ½ สามารถ
แสดงได้ 0 ถึง 1999 ตัวเลขที่แสดงได้น้อยที่สุดคือ 1 : ความแยกชัดเป็น 1 ใน 2000 ส่วน หรือ 0.05% ปัจจุบันนิยมใช้ ขนาดของสัญญาณ อินพุตต่ำสุดที่แสดงได้
ในสเกลนั้นๆ เช่น DMM 3 ½ หลักที่ สเกล 200V จะมีความแยะชัด 0.1V
3. ความไว (sensitivity) เป็นการเปลี่ยนแปลงขนาดสัญญาณต่ำที่สุดที่ DMM สามารถแสดงออกใหเห็นได้ของสเกลแรงดันที่ต่ำที่สุด เช่น DMM 3 ½ หลักที่สเกล
200mV จะมีความไว 0.1mV
4. ความเที่ยงตรง (accuracy) เป็นตัวเลขที่แสดงว่า ค่าที่อ่านได้นัน้ผิดพลาดไปจากค่าที่ ถูกต้องเพียงใด
5. อินพุตอิมพีแดนซ์ (input impedance) เป็นค่าที่ใช้พิจารณาว่า การใช้ DMM วัดแรงดันอยู่นั้นตัวมิเตอร์ไปโหลดมากน้อยเพียงใด โดยทั่วไปมีค่าประมาณ10MW
6.แสดงขั้วอัตโนมัติ (auto polarity) เป็นคุณสมบัติปกติของ DMM เนื่องจากโครงสร้างการทำงานของชิปไอซีที่เปลี่ยนสัญญาณแอนะลอกให้เป็นสัญญาณดิจิตอล
ออกแบบให้สามารถวัด แรงดันไฟตรงที่มีศักย์เป็นบวกหรือเป็นลบก็ได้โดยตรง
7.ปรับศูนย์อัตโนมัติ (auto zero) เป็นคุณสมบัติปกติของ DMM ตามเงื่อนไขการทำงานของไอซี ที่ถูกออกแบบมา
8.ปรับสเกลอัตโนมัติ (auto ranging) เป็น คุณสมบัติปกติของ DMM โดยถ้าวัดกระแส หรือแรงดัน จะเริ่มปรับจากสเกลต่ำสุดก่อนตามลำดับจนถึงสเกลสูงสุด
กรณีวัดความ ต้านทาน จะเริ่มปรับจากสเกลสูงสุดก่อนตามลำดับจนถึงสเกลต่ำสุด
9.การขจัดสัญญาณรบกวนแบบวิธีปกติ (normal mode noise rejection : NMR) เป็นค่าที่แสดงความสามารถที่จะขจัดสัญญาณรบกวนไฟสลับภายนอกที่เข้ามา
แซกแซงสัญญาณไฟตรงที่ต้องการวัด ตามปกติค่า NMR จะมีหน่วยเป็น เดซิเบล ที่ความถี่หนึ่ง
10. การขจัดสัญญาณรบกวนแบบวิธีร่วม (common mode noise rejection : CMR) เป็นค่าที่แสดงความสามารถที่จะขจัดสัญญาณรบกวนขึ้นระหว่างขั้วอินพุตของ
เครื่องและกราวด์ของเครื่องขณะทำการวัด มีหน่วยเป็นเดซิเบล ที่ความถี่หนึ่ง และจะต้องระบุค่าความต้านทานที่ไม่สมดุลย์ในขั้วสัญญาณต่ำด้วย (ปกติ 1KW)
11. แรงดันตกคร่อมขั้วกระแส (Voltage burden) เป็นค่าแรงดันสูงสุดที่เกิดขึ้นตกคร่อมขั้ววัดกระแสขณะทำการวัดกระแส
12. เวลาตอบสนอง (response time or setting time) ส่วนมากจะใช้เวลาแสดงผลขณะวัดแรงดันและกระแสไฟตรงน้อยกว่า 1 วินาทีไฟสลับน้อยกว่า 2 วินาทีแต่อาจ
จะถึง 4 วินาทีสำหรับวัดความต้านทานที่สเกล 2MW และ 20MW
13. ตัวประกอบค่ายอด (crest factor) เป็นตัวเลขแสดงความสามารถของวงจรเปลี่ยนสัญญาณ AC เป็น DC ที่มีอยู่ในเครื่อง ตลอดจนภาคขยายต่างๆ ว่าสามารถรับรูป
คลื่น ACที่มีขนาดสูงๆ เมื่อเทียบกับค่า rms ของสัญญาณนั้นได้มากน้อยเพียงใดโดยไม่อิ่มตัว ตัวเลขนี้จะมีความสำคัญ เมื่อใช้วัดพัลซ์หรือสัญญาณรบกวน
 ตัวประกอบค่ายอดสัญญาณไซน์เป็น 1.4 และสัญญาณสี่เหลี่ยมเป็น 1 และรูปคลื่นทั่วๆไปจะอยู่ในช่วง 1 ถึง 3
ตัวประกอบค่ายอดสัญญาณไซน์เป็น 1.4 และสัญญาณสี่เหลี่ยมเป็น 1 และรูปคลื่นทั่วๆไปจะอยู่ในช่วง 1 ถึง 3
โครงสร้างโมดูลของมอดูลของดิจิตอลโวลท์มิเตอร์
ส่วนประกอบของดิจิตอลโวลท์มิเตอร์ ประกอบด้วย 2 ส่วนใหญ่ๆ คือ วงจรเปลี่ยนสัญญาณแอนะลอกเป็นสัญญาณดิจิตอล A/D (Analog to Digital conversion) และวง
จรนำสัญญาณดิจิตอลไปแสดงผลเป็นตัวเลข วงจร A/D มีหลายแบบ เช่น แบบวงจรเปรียบเทียบขนาน (Parallel Comparator); แบบสโลปเดี่ยวหรือแรมป์เดี่ยว (single slop or Single
Ramp), แบบใช้ประมาณค่า (Successive Approximation) และ แบบสโลปคู่ (Dual Slop) ซึ่งแบบนี้นิยมใช้ในปัจจุบัน โดยจะถูกออกแบบมาให้อยู่ในชิปไอซีตัวเดียวซึ่งรวมทั้งภาค
ควบคุมการแสดงผลด้วย
วงจรอินทิเกรเตอร์
ส่วนสำคัญที่สุดซึ่งทำให้มอดูลของดิจิตอลโวลท์มิเตอร์ถูกสร้างขึ้นคือ ความเที่ยงตรงของวงจร อินทิเกรเตอร์ ในการตรวจสอบระดับแรงดันของสัญญาณอินพุต โดยการสร้าง
สัญญาณแรมป์ที่มีความชันคงที่ ทั้งในช่วงของการประจุและคายประจุของตัวเก็บประจุ ซึ่งวงจรอินทิเกรเตอร์จะถูกต่อร่วมกับวงจรเปรียบเทียบ และวงจรควบคุมตามรูป
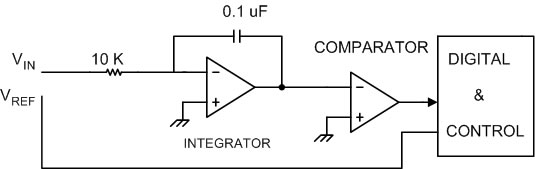 รูปที่ 6.1 แสดงวงจรอินทิเกรเตอร์
ลักษณะของวงจร I/P มีสวิทซ์เลือกระหว่างแรงดันอินพุตที่จะวัดกับแรงดันอ้างอิง ส่วนแรกคือวงจรกำเนิดสัญญาณแรมป์หรือวงจรอินทิเกรเตอร์ ออปแอมป์จะทำหน้าที่
เป็นตัวจ่ายกระแสคงที่ทำให้แรงดันที่ O/P ของออปแอมป์เป็นสัญญาณแรมป์ที่เป็นเชิงเส้น
รูปที่ 6.1 แสดงวงจรอินทิเกรเตอร์
ลักษณะของวงจร I/P มีสวิทซ์เลือกระหว่างแรงดันอินพุตที่จะวัดกับแรงดันอ้างอิง ส่วนแรกคือวงจรกำเนิดสัญญาณแรมป์หรือวงจรอินทิเกรเตอร์ ออปแอมป์จะทำหน้าที่
เป็นตัวจ่ายกระแสคงที่ทำให้แรงดันที่ O/P ของออปแอมป์เป็นสัญญาณแรมป์ที่เป็นเชิงเส้น
เมื่อ Vin เป็น + O/P ของวงจรแรมป์จะเป็นแรมป์ทางลบ วงจรเปรียบเทียบจะทำหน้าที่ตรวจสอบระดับแรงดัน เพื่อสร้างลอจิก 0,1 ให้กับวงจรดิจิตอล นับค่าไปยังค่ากำ
หนด t1แล้วควบคุมให้สวิทซ์ต่อกับ VREF ที่มีศักดิ์ตรงข้าม I/P จะทำให้ O/P วงจรแรมป์จะเป็นแรมป์ทางบวก (t2) ที่ช่วง t2 ที่ถูกวงจรนับค่าไว้จะเป็นสัดส่วนโดยตรงกับแรงดันอินพุต
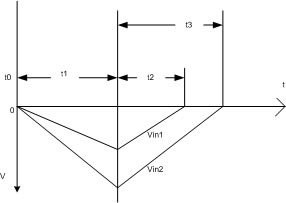 รูปที่ 6.2 แสดงเอ้าต์พุตของวงจรอินทิเกรเตอร์เมื่อเทียบกับเวลา
ความชันของสัญญาณแรมป์สามารถคำนวณได้จากความสัมพันธ์ของประจุ q = CV และ q = It โดยนำ 2 สมการมาเท่ากัน
รูปที่ 6.2 แสดงเอ้าต์พุตของวงจรอินทิเกรเตอร์เมื่อเทียบกับเวลา
ความชันของสัญญาณแรมป์สามารถคำนวณได้จากความสัมพันธ์ของประจุ q = CV และ q = It โดยนำ 2 สมการมาเท่ากัน  แต่กระแสเท่ากับ
แต่กระแสเท่ากับ  ดังนั้น
ดังนั้น
 จากรูปวงจรอินทิเกรเตอร์ ถ้าให้แรงดันอินพุต + 2 V จะได้ความชันของสัญญาณแรมป์ทางเอ้าต์พุตเป็น – 2V/mS
จากรูปวงจรอินทิเกรเตอร์ ถ้าให้แรงดันอินพุต + 2 V จะได้ความชันของสัญญาณแรมป์ทางเอ้าต์พุตเป็น – 2V/mS
จากรูปที่ 6.1 วงจรอินทิเกรเตอร์ เมื่อสวิทซ์ต่อกับสัญญาณอินพุต จะทำให้มีแรงดันบวกจากอินพุตป้อนเข้าสู่วงจรอินทิเกรเตอร์ได้เอ้าต์พุตออกมาเป็นแรมป์ทางลบ วงจร
เปรียบเทียบจะทำหน้าที่ตรวจสอบระดับแรงดันเอ้าต์พุตของวงจรอินทิเกรเตอร์ เพื่อสร้างลอจิก 1 หรือ 0 ให้กับวงจรดิจิตอลและวงจรควบคุมโดยวงจรดิจิตอลจะมีภาควงจรนับ นับไป
ค่าที่กำหนด t1 แล้วควบคุมให้สวิทซ์ต่อเข้ากับแรงดันอ้างอิงที่มีศักย์ตรงข้ามกับอินพุต วงจรอินทิเกรเตอร์จะให้แร้มป์ทางบากคือค่าที่เป็นลบค่อยๆลดลง จนเข้าสู่ระดับ 0 ซึ่งเป็นช่วง
เวลา t2 ช่วงเวลา t2 ที่ถูกวงจรนับ นับค่าไว้จะเป็นสัดส่วนโดยตรงกับแรงดันอินพุต
ผลจากการทำงานของวงจรในลักษณะนี้ ทำให้ค่าแรงดันสัญญาณแร้มป์ทางเอ้าต์พุตของวงจรที่เกิดจากแรงดันอินพุตและแรงดันอ้างอิงมีค่าเท่ากันคือ
Vin/Rc X t1 = VREF/RC X t2
Vin = VREF x t2/t1
จากสมการแรงดันอินพุตที่อ่านได้ขึ้นกับ ค่าแรงดันอ้างอิงและอัตราส่วนของเวลาการอินทริเกรตแรงดันอ้างอิงและแรงดันอินพุต ความเที่ยงตรงในการอ่านจึงขึ้นกับแรงดันอ้างอิง
ที่สร้างขึ้นกับช่วงเวลาในการนับของภาควงจรนับจากรูป O/P จะเป็บลบสูงสุดเมื่อสิ้นสุดค่าของเวลา t1 และจะเป็นลบน้อยลง (t2) โดยเวลา t1,t2 เกิดจากการวัดค่า Vin1 เช่นเดียวกัน
เวลา t1,t3 เกิดจากการวัด Vin2 ช่วงเวลา t3>t2 แสดงว่า Vin2> Vin1 เนื่องจากประจุใช้เวลาเท่ากัน (t1) แต่แรงดันสูงขึ้นเมื่อคายประจุจึงต้องใช้เวลามากขึ้น (t3) ดังนั้น ช่วงเวลา t1
ความชันของเส้นกราฟจึงไม่เท่ากัน แต่ช่วงเวลา t2,t3 จะเท่ากันและคงที่ เท่ากับ + VREF/RC
ตัวอย่างของค่าตัวเลขที่ถูกนำมาใช้ออกแบบโมดูลดิจิตอลโวลท์มิเตอร์ ขนาด 3 1/2 หลักคือ
VREF = 100 mV และช่วงเวลา t1 ใช้ CLOCK 1 KHz ส่วนค่าเวลาจริงขึ้นกับการกำหนดความถี่ของสัญญาณนาฬิกา เวลาสูงสุดของ t2 จะเป็น 2 เท่าของ t1 เนื่องจากการ
แสดงค่าสูงสุดของดิจิตอลโวลท์มิเตอร์ ขนาด 3 1/2 หลัก คือ 1999 หรือ 2 เท่าของ 1000 ดังนั้นแรงดันของอินพุตที่วัดได้ จึงมีค่า 200mV หรือ 2 เท่าของแรงดันอ้างอิงนั่นเอง
วงจรเปลี่ยนสัญญาณ A/D แบบสโลปคู่ (Dual Slop A/D Converter)
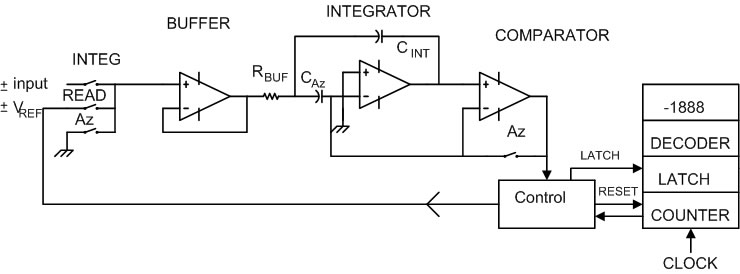 รูปที่ 6.3 โครงสร้างการทำงานวงจร A/D แบบสโลปคู่
จากรูปที่ 6.3 เริ่มจากวงจรบัปเฟอร์ ทำหน้าที่ ให้ค่า Input impedance สูง และให้ค่า Output impedance ต่ำเพื่อไม่ให้มีผลกระทบต่อ RBUF วงจรอินทริเกรเตอร์ ทำหน้าที่
สร้างสัญญาณเชิงเส้น ที่มีแรงดันตรงกันข้ามกับอินพุต วงจรเปรียบเทียบ ทำหน้าที่ตรวจสอบระดับแรงดัน O/P ของวงจรอินทริเกรเตอร์ (ถ้าเป็น 0 จะส่งสัญญาณลอจิกไปยังภาคควบ
คุม เพื่อควบคุมส่วนต่างๆ) สวิทซ์ที่ทำหน้าที่ตัดต่อวงจรในส่วนต่างๆ
โครงสร้างจะเป็นมอสเฟต ใน 1 รอบการทำงานของวงจรจะแบ่งเป็น 3 ช่วงเวลา คือ
รูปที่ 6.3 โครงสร้างการทำงานวงจร A/D แบบสโลปคู่
จากรูปที่ 6.3 เริ่มจากวงจรบัปเฟอร์ ทำหน้าที่ ให้ค่า Input impedance สูง และให้ค่า Output impedance ต่ำเพื่อไม่ให้มีผลกระทบต่อ RBUF วงจรอินทริเกรเตอร์ ทำหน้าที่
สร้างสัญญาณเชิงเส้น ที่มีแรงดันตรงกันข้ามกับอินพุต วงจรเปรียบเทียบ ทำหน้าที่ตรวจสอบระดับแรงดัน O/P ของวงจรอินทริเกรเตอร์ (ถ้าเป็น 0 จะส่งสัญญาณลอจิกไปยังภาคควบ
คุม เพื่อควบคุมส่วนต่างๆ) สวิทซ์ที่ทำหน้าที่ตัดต่อวงจรในส่วนต่างๆ
โครงสร้างจะเป็นมอสเฟต ใน 1 รอบการทำงานของวงจรจะแบ่งเป็น 3 ช่วงเวลา คือ
- ช่วงปรับศูนย์อัตโนมัติ (Auto-zero periods; AZ)
- ช่วงอินทริเกรต (Integrate period)
- ช่วงดีอินทริเกรต (Deintegrate) หรือช่วงอ่าน (Read)
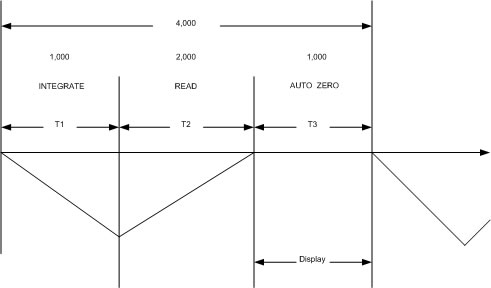 รูปที่ 6.4 แสดงแผนภาพเวลาการทำงานในแต่ละช่วงของสวิทซ์
ช่วงเวลาปรับศูนย์ สวิทซ์ AZ จะทำงาน โดยมี CAZ ทำหน้าที่ประจุแรงดันออฟเซ็ทที่ O/P ของออปแอมป์ เพื่อนำไปหักล้างกับแรงดันออฟเซ็ทขณะอินทริเกรตและดีอินทริ
เกรต ช่วงอินทริเกรต(t1) สวิทซ์ INTEG จะทำงาน ความชันของการประจุจะเป็นสัดส่วนกับแรงดันอินพุตที่ไม่ทราบค่า เวลาในการประจุจะถูกควบคุมโดยการนับของวงจรนับ สำหรับ
โมดูล 3 1/2 หลัก ปกติใช้พัลซ์ 1,000 ลูก เมื่อ t1 สินสุดลง ภาคควบคุมสวิทซ์ READ ให้ทำงานเพื่อเริ่มต้นการอ่าน
ช่วงการอ่าน (t2) สวิทซ์ READ จะทำงานโดยขั้วของแรงดันอ้างอิงจะถูกเลือกให้มีขั้วตรงข้ามกับแรงดันอินพุตที่ทำการวัดโดยอัตโนมัติ เพื่อทำให้ O/P ของวงจรอินทริเกรต
ลดลงภาคนับจะเริ่มนับตั้งแต่ช่วงดีอินทริเกรตจนกระทั่งแรงดันลดลงเป็น 0 พอดี ช่วง t2 นี้จะใช้จำนวนพัลซ์สูงสุด 2,000 ลูก ถ้านับถึง 2,000 แล้ว O/P ยังไม่เป็น 0 แสดงว่าค่าที่วัด
เกินสเกลจะแสดงค่า 1 แทน ถ้านับไม่ถึง 2,000 เอ้าต์พุตเป็น 0 ก่อน เวลาที่เหลือจะปัดให้ t3 ซึ่งเป็นช่วงปรับศูนย์อัตโนมัติ เมื่อเอ้าต์พุตลดลงเป็น 0 วงจรเปรียบเทียบจะเปลี่ยน
สถานะเอ้าต์พุต เพื่อให้ภาคควบคุมหยุดการดีอินทิเกรตแล้วกลับเข้าสู่การปรับศูนย์อัตโนมัติเพื่อเตรีมตัวอ่านรงดันอินพุตอีกครั้ง
ในช่วงปรับศูนย์อัตโนมัติ t3 สวิทซ์ Az จะทำงานสวิทว์ตัวอื่นจะเปิดวงจร ช่วงเวลานี้จะมีค่า 1,000 ลูก โดยวงจรนับยังคงนับต่อจากช่วง t2 ไปจนครบ 3,000 ลูก จึงถือว่าครบ
รอบการทำงาน
สรุปการแบ่งช่วงเวลาทำงาน เริ่มจากฐานเวลาที่จะสร้างเป็นสัญญาณนาฬิกาให้กับวงจรนับ มีค่าตั้งแต่ 4 KHz ขึ้นไป โดยใชช่วงอินทิเกรตจะใช้ 1,000 ลูก ช่วงอ่านใช้ 2,000
ลูก เมื่อช่วงอ่านสิ้นสุดลง ภาคควบคุมจะส่งสัญญาณไปให้ภาคแลทเก็บข้อมูลจากวงจรนับ ให้มีการแสดงผลค้าง จากนั้นก็จะลบข้อมูลด้วยสัญญาณรีเซ็ท เพื่อเริ่มต้นรอนับใหม่ ในช่วง
เวลา t2 ดังนั้น การคำนวณหาจำนวนครั้งของการแสดงผลใน 1 วินาที หาได้จากจำนวนพั้ลซ์ต่อวินาทีของสัญญาณนาฬิกา หารด้วยจำนวนพั้ลซ์ที่ใช้ใน 1 รอบการทำงาน
รูปที่ 6.4 แสดงแผนภาพเวลาการทำงานในแต่ละช่วงของสวิทซ์
ช่วงเวลาปรับศูนย์ สวิทซ์ AZ จะทำงาน โดยมี CAZ ทำหน้าที่ประจุแรงดันออฟเซ็ทที่ O/P ของออปแอมป์ เพื่อนำไปหักล้างกับแรงดันออฟเซ็ทขณะอินทริเกรตและดีอินทริ
เกรต ช่วงอินทริเกรต(t1) สวิทซ์ INTEG จะทำงาน ความชันของการประจุจะเป็นสัดส่วนกับแรงดันอินพุตที่ไม่ทราบค่า เวลาในการประจุจะถูกควบคุมโดยการนับของวงจรนับ สำหรับ
โมดูล 3 1/2 หลัก ปกติใช้พัลซ์ 1,000 ลูก เมื่อ t1 สินสุดลง ภาคควบคุมสวิทซ์ READ ให้ทำงานเพื่อเริ่มต้นการอ่าน
ช่วงการอ่าน (t2) สวิทซ์ READ จะทำงานโดยขั้วของแรงดันอ้างอิงจะถูกเลือกให้มีขั้วตรงข้ามกับแรงดันอินพุตที่ทำการวัดโดยอัตโนมัติ เพื่อทำให้ O/P ของวงจรอินทริเกรต
ลดลงภาคนับจะเริ่มนับตั้งแต่ช่วงดีอินทริเกรตจนกระทั่งแรงดันลดลงเป็น 0 พอดี ช่วง t2 นี้จะใช้จำนวนพัลซ์สูงสุด 2,000 ลูก ถ้านับถึง 2,000 แล้ว O/P ยังไม่เป็น 0 แสดงว่าค่าที่วัด
เกินสเกลจะแสดงค่า 1 แทน ถ้านับไม่ถึง 2,000 เอ้าต์พุตเป็น 0 ก่อน เวลาที่เหลือจะปัดให้ t3 ซึ่งเป็นช่วงปรับศูนย์อัตโนมัติ เมื่อเอ้าต์พุตลดลงเป็น 0 วงจรเปรียบเทียบจะเปลี่ยน
สถานะเอ้าต์พุต เพื่อให้ภาคควบคุมหยุดการดีอินทิเกรตแล้วกลับเข้าสู่การปรับศูนย์อัตโนมัติเพื่อเตรีมตัวอ่านรงดันอินพุตอีกครั้ง
ในช่วงปรับศูนย์อัตโนมัติ t3 สวิทซ์ Az จะทำงานสวิทว์ตัวอื่นจะเปิดวงจร ช่วงเวลานี้จะมีค่า 1,000 ลูก โดยวงจรนับยังคงนับต่อจากช่วง t2 ไปจนครบ 3,000 ลูก จึงถือว่าครบ
รอบการทำงาน
สรุปการแบ่งช่วงเวลาทำงาน เริ่มจากฐานเวลาที่จะสร้างเป็นสัญญาณนาฬิกาให้กับวงจรนับ มีค่าตั้งแต่ 4 KHz ขึ้นไป โดยใชช่วงอินทิเกรตจะใช้ 1,000 ลูก ช่วงอ่านใช้ 2,000
ลูก เมื่อช่วงอ่านสิ้นสุดลง ภาคควบคุมจะส่งสัญญาณไปให้ภาคแลทเก็บข้อมูลจากวงจรนับ ให้มีการแสดงผลค้าง จากนั้นก็จะลบข้อมูลด้วยสัญญาณรีเซ็ท เพื่อเริ่มต้นรอนับใหม่ ในช่วง
เวลา t2 ดังนั้น การคำนวณหาจำนวนครั้งของการแสดงผลใน 1 วินาที หาได้จากจำนวนพั้ลซ์ต่อวินาทีของสัญญาณนาฬิกา หารด้วยจำนวนพั้ลซ์ที่ใช้ใน 1 รอบการทำงาน
อัตราการแสดงผล = จำนวนพัลซ์ของสัญญาณ / วินาที หาร จำนวนพัลซ์ที่ใช้ใน1 รอบการทำงาน
คุณสมบัติต่างๆของโมดูลดิจิตอลโวลท์มิเตอร์
ตัวอย่าง เบอร์ไอซีที่นิยมนำมาสร้าง (DVM)
7106 ใช้กับแผงแสดงผลแบบผลึกเหลว ขนาด 3 1/2 หลัก*
7107 ใช้กับแผงแสดงผลแบบ LED ขนาด 3 1/2 หลัก
7116 ใช้กับแผงแสดงผลแบบผลึกเหลว ขนาด 3 1/2 หลัก
7117 ใช้กับแผงแสดงผลแบบ LED ขนาด 3 1/2 หลัก
7126 ใช้กับแผงแสดงผลแบบผลึกเหลว ขนาด 3 1/2 หลัก*
IC # 7126 --->>Vt = 9 V, I = 50 uA -100 uA ที่ 15 V เป็น CMOS แสดงผลได้ 3 1/2 หลัก มีวงจร A/D, Decoder 7 ส่วน, วงจรขับแผงแสดงผล
แบบผลึกเหลว, วงจรขับแผ่นหลังของแผงแสดงผล (back plane), วงจรสร้างสัญญาณนาฬิกา และแรงดันอ้างอิง
ตำแหน่งขาใช้งานของ IC # 7126
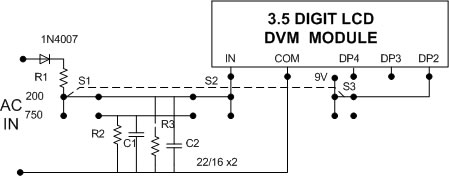
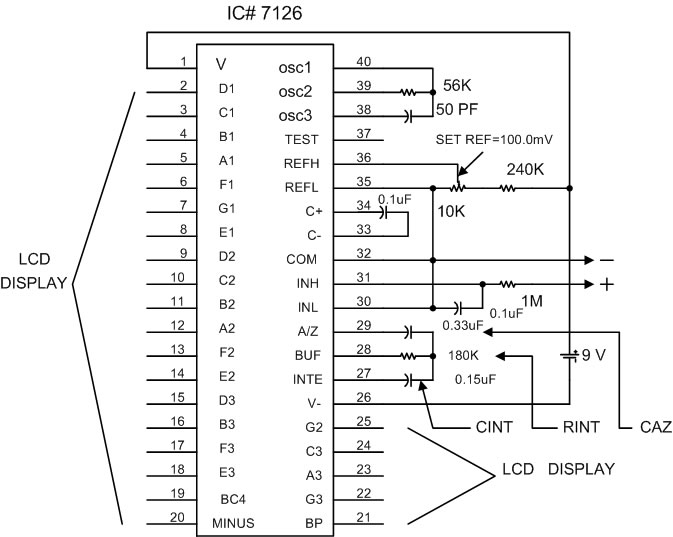 รูปที่ 6.5 แสดงวงจร DVM สำหรับแสดงผล 1 ครั้งต่อวินาที
รูปที่ 6.5 แสดงวงจร DVM สำหรับแสดงผล 1 ครั้งต่อวินาที
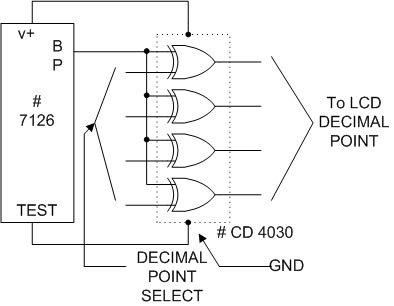 รูปที่ 6.6 แสดงวงจรขับจุดทศนิยมของแผงแสดง LCD โดยใช้ EX-OR
การเลือกอุปกรณ์
รูปที่ 6.6 แสดงวงจรขับจุดทศนิยมของแผงแสดง LCD โดยใช้ EX-OR
การเลือกอุปกรณ์
Rint ต้องมีค่ามากเพื่อจะรักษาความเป็นเชิงเส้นตลอดช่วงแรงดันอินพุต ถ้ามากไปจะมีผลต่อกระแส รั่วไหล สำหรับสเกล 2V ใช้ค่า 1.8MW สเกล 200mV ใช้ค่า 180KW
Cint ต้องเลือกค่าความจุให้ค่าแรงดันสูงสุดได้โดยไม่อิ่มตัว (ประมาณ 0.3V) ค่าที่เหมาะสม Cint = 0.047uF สำหรับแสดงผลใน 3 ครั้ง/นาที (Clock=48KHz) และ Cint
= 0.015uF สำหรับแสดงผลใน 1 ครั้ง/นาที (Clock=16KHz)
Caz เพื่อใช้ปรับศูนย์อัตโมมัติ ควรใช้ค่า 0.33uF เพื่อป้องกันสัญญาณรบกวน ที่สเกล 200mV และ 0.033uF ที่สเกล 2V
CREF (ที่ขา REFL)ค่าความจุ 0.1uF ดีที่สุดสำหรับการใช้งาน
อุปกรณ์กำหนดความถี่
เลือกใช้ C=50PF แล้วเลือก ค่า R โดยหาได้จากสมการ f = 0.45/ RC (ถ้าต้องการ 48KHz แสดงผล 3 ครั้ง/นาที ใช้ค่า 180KW
แรงดันอ้างอิง
I/P แอนะลอก O/P เต็มสเกลมีค่า 2,000 หน่วยนับ โดยที่ค่า VIN = 2VREF ดังนั้นสำหรับสเกล 200.00mV และ 2.000V แรงดัน VREF จะมีค่า 100.0mV
และ 1.000V
การออกแบบ DC DVM
จะนำเอาโมดูลดิจิตอลโวลท์มิเตอร์ มาขยายย่านวัด
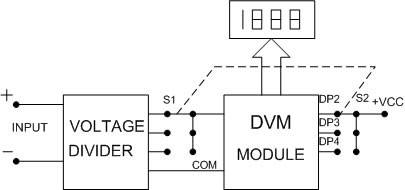 รูปที่ 6.7 แสดง DC DVM
แผงแสดงผลแบบ LCD
รูปที่ 6.7 แสดง DC DVM
แผงแสดงผลแบบ LCD
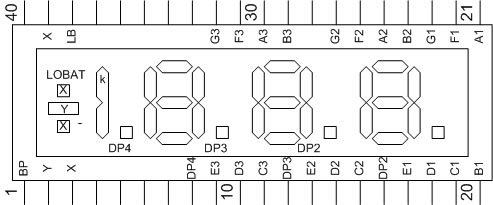 รูปที่ 6.8 แสดงขาใช้งานของแผง LCD ขนาด 3 1/2 หลัก
วงจรดิจิตอลโวลท์มิเตอร์กระแสตรง 0 - 1000 V
รูปที่ 6.8 แสดงขาใช้งานของแผง LCD ขนาด 3 1/2 หลัก
วงจรดิจิตอลโวลท์มิเตอร์กระแสตรง 0 - 1000 V
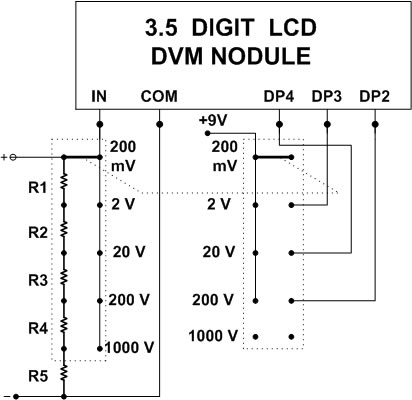 รูปที่ 6.9 แสดงวงจรดิจิตอลโวลท์มิเตอร์กระแสตรงสเกล 0 – 1000V
แต่ละสเกลจะต่างกัน 10 เท่า เนื่องจากโมดูลมีการนับสิบในแต่ละหลักย่านสุดท้ายต่างกัน 5 เท่า เงื่อนไขการออกแบบวงจรแบ่งแรงดัน คือ R ที่ I/P ถ้าต่ำไปจะไปโหลดสัญ
ญาณ I/P แรงวัดแรงดันคร่อม R ได้ไม่สูงมากโดยทั่วไปค่า R ที่ I/P จะมีค่า 10MW ทุกย่านวัด DVM บางรุ่นอาจเพิ่มค่า R บางสเกลให้สูงขึ้นโดยใช้สวิทซ์เข้าช่วย
จากรูปวงจร กำหนดค่า Zin = 10 MW คำนวณค่า R ได้ดังนี้ เมื่อสเกลมีอัตราส่วนลดทอนเป็น 10 เท่าของย่านถัดไป
R1+R2+R3+R4+R5 = 10MW
รูปที่ 6.9 แสดงวงจรดิจิตอลโวลท์มิเตอร์กระแสตรงสเกล 0 – 1000V
แต่ละสเกลจะต่างกัน 10 เท่า เนื่องจากโมดูลมีการนับสิบในแต่ละหลักย่านสุดท้ายต่างกัน 5 เท่า เงื่อนไขการออกแบบวงจรแบ่งแรงดัน คือ R ที่ I/P ถ้าต่ำไปจะไปโหลดสัญ
ญาณ I/P แรงวัดแรงดันคร่อม R ได้ไม่สูงมากโดยทั่วไปค่า R ที่ I/P จะมีค่า 10MW ทุกย่านวัด DVM บางรุ่นอาจเพิ่มค่า R บางสเกลให้สูงขึ้นโดยใช้สวิทซ์เข้าช่วย
จากรูปวงจร กำหนดค่า Zin = 10 MW คำนวณค่า R ได้ดังนี้ เมื่อสเกลมีอัตราส่วนลดทอนเป็น 10 เท่าของย่านถัดไป
R1+R2+R3+R4+R5 = 10MW
 R1+R2+R3+R4+R5 = 10MW
R1+R2+R3+R4+R5 = 10MW
R2+R3+R4+R5 = 1MW (STEP ละ 10 เท่า)
R3+R4+R5 = 0.1MW = 100KW
R4+R5 = 10KW
และ R5 = 1KW
ดังนั้นจะได้ค่า R5 = 1KW, R4 = 9KW, R3 = 90KW, R2 = 900KW, R1 = 9MW
S2 ใช้ทำหน้าที่เลือกตำแหน่งของ dp เพื่อให้เหมาะสมกับสเกลที่เลือกคือ
สเกล |
200mV |
2V |
20V |
200V |
1000V |
ตำแหน่ง |
DP2 |
DP4 |
DP3 |
DP2 |
- |
การออกแบบดิจิตอลแอมป์มิเตอร์ไฟกระแสตรง
เนื่องจากคุณสมบัติของไอซีที่นำมาสร้างเป็นโมดูล ของดิจิตอลโวลท์มิเตอร์ สามารถรับสัญญาณอินพุตได้เฉพาะแรงดันไฟตรงเท่านั้น ดังนั้นการที่จะวัดค่ากระแสได้จำเป็น
ต้องมีวงจรเปลี่ยนค่าของกระแสเป็นค่าแรงดัน วิธีการที่นิยมใช้กันคือใช้ตัวต้านทานค่าต่ำต่อเป็นชันต์เพื่ออนุกรมกับโหลดในวงจรจ่ายกระแส ซึ่งมีผลเสียเกี่ยวกับค่าความถูกต้องในการ
อ่าน เพราะตัวต้านทานที่ต่ออนุกรมกับโหลดจะมีผลทำให้ค่ากระแสที่อ่านได้ต่ำกว่าค่าความเป็นจริงเล็กน้อยซึ่งเกิดจากแรงดันตกคร่อมขั้ววัดนั่นเอง โดยจะมีค่าสูงสุดประมาณ 300mV
– 900mV ขึ้นกับสเกลการวัดแม้ว่าค่าแรงดันนี้จะต่ำแต่เมื่อนำไปใช้วัดแหล่งจ่ายไฟแรงดันต่ำและจ่ายกระแสสูง ค่าความผิดพลาดจะสูงตาม แต่ก็สามารถแก้ไขได้โดยใช้แคมป์ตัวปรับ
ต่อ (Clamp adapter) ซึ่งจะให้เอ้าต์พุต 1mV/A
 รูปที่ 6.10 แสดงโครงสร้างการทำงานของดิจิตอลแอมป์มิเตอร์กระแสตรง
รูปที่ 6.10 แสดงโครงสร้างการทำงานของดิจิตอลแอมป์มิเตอร์กระแสตรง
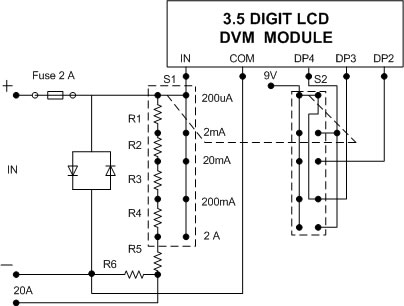 รูปที่ 6.11 แสดงวงจรดิจิตอลแอมป์มิเตอร์สเกล 0 – 20A
จากรูปที่ 6.11 เป็นวงจรดิจิตอลแอมป์มิเตอร์กระแสตรงสเกล 0 – 20A โดยแบ่งเป็น 5 สเกลคือ สเกล 200uA, 2mA, 20mA, 200mA, 2A สเกล 0 – 2A นี้ต่อขั้ววัดเข้า
ที่ขั้วบากและลบ (ขาร่วมของวงจร) ช่วงสเกลนี้มีฟิวส์ 2A ต่ออนุกรมกับขั้ววัดและเพาเวอร์ไดโอด 2 ตัว ต่อคร่อมตัวต้านทานชันต์ในลักษณะตรงกันข้ามเพื่อป้องกันไม่ให้ตัวต้านทาน
ชันต์ที่ต่อเสียหาย กรณีขั้วอินพุตไปวัดแรงดันเพียงแต่มำให้ฟิวส์ขาดสำหรับช่วงสเกล 20A จะไปใช้ร่วมกับสเกล 20mA สเกล 20A นี้ขั้วต่อวัดเข้าที่ขั้ว 20A และขั้วลบสเกลนี้ไม่มีการ
ป้องกันใดๆ กรณีใช้เสกล 20A วัดกระแสเกิน 10A ชันต์ในวงจรจะร้อนมีผลทำให้ค่าความต้านทานเปลี่ยนไปจึงไม่ควรวัดเกิน 30 วินาที การออกแบบวงจรต้องกำหนดเงื่อนไขของวงจร
ซึ่งจะมีการกำหนดแรง ดันเต็มสเกลของโมดูลในกรณี 3 ½ หลัก จะมีค่า 200mV ส่วนการกำหนดอัตราส่วนการลดทอนของย่านการวัดถัดไป จะใช้ 10 เท่าเช่นเดียวกันกับวงจรแบ่ง
แรงดันของดิจิตอลโวลท์มิเตอร์
รูปที่ 6.11 แสดงวงจรดิจิตอลแอมป์มิเตอร์สเกล 0 – 20A
จากรูปที่ 6.11 เป็นวงจรดิจิตอลแอมป์มิเตอร์กระแสตรงสเกล 0 – 20A โดยแบ่งเป็น 5 สเกลคือ สเกล 200uA, 2mA, 20mA, 200mA, 2A สเกล 0 – 2A นี้ต่อขั้ววัดเข้า
ที่ขั้วบากและลบ (ขาร่วมของวงจร) ช่วงสเกลนี้มีฟิวส์ 2A ต่ออนุกรมกับขั้ววัดและเพาเวอร์ไดโอด 2 ตัว ต่อคร่อมตัวต้านทานชันต์ในลักษณะตรงกันข้ามเพื่อป้องกันไม่ให้ตัวต้านทาน
ชันต์ที่ต่อเสียหาย กรณีขั้วอินพุตไปวัดแรงดันเพียงแต่มำให้ฟิวส์ขาดสำหรับช่วงสเกล 20A จะไปใช้ร่วมกับสเกล 20mA สเกล 20A นี้ขั้วต่อวัดเข้าที่ขั้ว 20A และขั้วลบสเกลนี้ไม่มีการ
ป้องกันใดๆ กรณีใช้เสกล 20A วัดกระแสเกิน 10A ชันต์ในวงจรจะร้อนมีผลทำให้ค่าความต้านทานเปลี่ยนไปจึงไม่ควรวัดเกิน 30 วินาที การออกแบบวงจรต้องกำหนดเงื่อนไขของวงจร
ซึ่งจะมีการกำหนดแรง ดันเต็มสเกลของโมดูลในกรณี 3 ½ หลัก จะมีค่า 200mV ส่วนการกำหนดอัตราส่วนการลดทอนของย่านการวัดถัดไป จะใช้ 10 เท่าเช่นเดียวกันกับวงจรแบ่ง
แรงดันของดิจิตอลโวลท์มิเตอร์
ตัวอย่าง กำหนดแรงดันตกคร่อมอินพุตเต็มสเกลของดิจิตอลแอมป์มิเตอร์มีค่า 200mV การวัดมีย่าน 200uA, 2 mA, 20mA, 200mA, 2A และ 20A
> จงคำนวณหาค่า R1, R2, R3, R4, R5, R6 <
ย่าน 200uA ได้ = 200mA/200uA = 1K
ย่าน 2mA = 100W
ย่าน 20mA = 10W
ย่าน 200mA = 1W
ย่าน 2A = 0.1W
ย่าน 20A = 0.01W
จะได้ R6 = 0.01
R5+R6 = 0.1
R4+R5+R6 = 1
R3+R4+R5+R6 = 10
R2+R3+R4+R5+R6 = 100
R1+R2+R3+R4+R5+R6 = 1000
ดังนั้นจะได้ค่าต่างๆดังนี้
R1 = 900W
R2 = 90W
R3 = 9W
R4 = 0.9W
R5 = 0.09W
R6 = 0.01W
หมายเหตุ ค่าแรงดันที่ตกคร่อมขั้ววัดจะมีค่ามากกว่าแรงดันอินพุตเต็มสเกล เพราะว่าการใช้ฟิวส์ต่ออนุกรมกับขั้ววัด ทำให้แรงดันบางส่วนตกคร่อมฟิวส์
การออกแบบดิจิตอลแอมป์มิเตอร์ไฟกระแสสลับ
การวัดแรงดันไฟสลับ ปกติจะใช้วิธีเปลี่ยนแรงดันไฟสลับเป็นแรงไฟตรง ในลักษณะของค่าแรงดันเฉลี่ย ซึ่งจะใช้วงจรเรียงกระแสแบบครึ่งคลื่นเป็นตัวแปลงสัญญาณสำหรับ
มัติมิเตอร์ที่ถูกออกแบบมาให้วัดแรงดันไฟสลับค่ามากเท่านั้น จะมีเพียง 2 สเกลคือ 200V, 750V ซึ่งเป็นเงื่อนไขของการออกแบบที่คำนึงถึงความประหยัด แต่ถ้าต้องการให้สเกล
วัดมีค่าต่ำกว่านั้นจะใช้วงจรขยายสัญญาณช่วย ซึ่งทำให้เสกลต่ำสุดในการวัดเป็น 200mVAC เท่ากับการวัดแรงดันไฟตรง ค่าความผิดพลาดที่เกิดขึ้นมักเกิดจากสัญญาณรูปไซน์ที่
วัดมีการเพี้ยน ซึ่งจะมีผลทำให้ค่าแรงดันเฉลี่ยที่อ่านได้ผิดไปด้วยยังมีวิธีอื่นที่สามารถหลีกเลี่ยงค่าความผิดพลาดที่เกิดจากความเพี้ยนของรูปไซน์ คือการวัดค่าอาร์เอ็มเอสจากสัญ
ญาณโดยตรงซึ่งเป็นวิธีการทีนิยมใช้ในดิจิตอลมัลติมิเตอร์ราคาแพง
 รูปที่ 6.12 แสดงโครงสร้างการทำงานของดิจิตอลมัลติมิเตอร์ไฟกระแสสลับ
รูปที่ 6.12 แสดงโครงสร้างการทำงานของดิจิตอลมัลติมิเตอร์ไฟกระแสสลับ
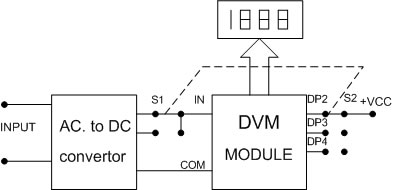
 รูปที่ 6.13 แสดงวงจรดิจิตอลโวลท์มิเตอร์ไฟกระแสสลับ
จากรูปที่ 6.13 วงจรมี 2 ย่านวัดคือ สเกล 200V และ สเกล 750V การเปลี่ยนแรงดันไฟ AC จะใช้ไดโอดทำหน้าที่เรียงกระแส R1 ทำหน้าที่เป็นตัวลดแรงดันไฟเฉลี่ยให้มี
ค่าต่ำร่วมกับ R2 – C1 และ R3 – C2 นอกจากนั้น R1 ยังเป็นตัวกำหนดค่าความต้านทานทางอินพุตของวงจรด้วย ดังนั้นในการออกแบบวงจร จะต้องกำหนดค่าแรงดันเต็มสเกล ซึ่ง
ในกรณีของการแสดงผล 3 ½ หลักจะมีค่า 200mV การกำหนดอัตราลดทอนสัญญาณจะใช้ 10 เท่าของย่านถัดไปและค่าความต้านทานอินพุตของวงจร
ตัวอย่าง
ถ้ากำหนดแรงดันเต็มสเกลของโมดูลมีค่า 200mV การวัดมี 2 ย่านคือ 200V, 2000V ค่าความต้านทานอินพุตของวงจรมีค่า 9MW จงคำนวณหาค่า R1, R2, R3
รูปที่ 6.13 แสดงวงจรดิจิตอลโวลท์มิเตอร์ไฟกระแสสลับ
จากรูปที่ 6.13 วงจรมี 2 ย่านวัดคือ สเกล 200V และ สเกล 750V การเปลี่ยนแรงดันไฟ AC จะใช้ไดโอดทำหน้าที่เรียงกระแส R1 ทำหน้าที่เป็นตัวลดแรงดันไฟเฉลี่ยให้มี
ค่าต่ำร่วมกับ R2 – C1 และ R3 – C2 นอกจากนั้น R1 ยังเป็นตัวกำหนดค่าความต้านทานทางอินพุตของวงจรด้วย ดังนั้นในการออกแบบวงจร จะต้องกำหนดค่าแรงดันเต็มสเกล ซึ่ง
ในกรณีของการแสดงผล 3 ½ หลักจะมีค่า 200mV การกำหนดอัตราลดทอนสัญญาณจะใช้ 10 เท่าของย่านถัดไปและค่าความต้านทานอินพุตของวงจร
ตัวอย่าง
ถ้ากำหนดแรงดันเต็มสเกลของโมดูลมีค่า 200mV การวัดมี 2 ย่านคือ 200V, 2000V ค่าความต้านทานอินพุตของวงจรมีค่า 9MW จงคำนวณหาค่า R1, R2, R3
วิธีทำ R1 = 9MW
เมื่อแรงดันไฟสลับมีค่า 200V แรงดันไฟตรงที่ป้อนเข้าวงจรดิจิตอลโวลท์มิเตอร์ควรมีค่า 200mV

 = 20.06KW
ทำนองเดียวกันที่สเกล 750V (2000 V)
คำนวณหา R4 ได้ = 2KW
การออกแบบดิจิตอลโอห์มมิเตอร์
= 20.06KW
ทำนองเดียวกันที่สเกล 750V (2000 V)
คำนวณหา R4 ได้ = 2KW
การออกแบบดิจิตอลโอห์มมิเตอร์
หลักการวัดค่าความต้านทานมีหลายวิธี วิธีที่ยังคงนิยมใช้ในช่วงสเกล 200W, 2KW, 20KW, 200KW, 2MW, 20MW คือการสร้างสเกลแรงดันอ้างอิงจากกระแสที่ไหลผ่าน
ตัวต้านทานมาตรฐานซึ่งมีค่า 100W, 1KW, 10KW, 100KW, 1MW, 10MW ตามลำดับ ปกติจะมีอยู่ในวงจรแบ่งแรงดันอยู่แล้วคือค่า 1KW, 9KW, 90KW, 900KW, 9MW จึงต้อง
นำค่าที่มีอยู่มารวมกันให้เหมาะสมแต่ละสเกล ส่วนความต้านทาน 100W ต้องต่อเพิ่มเนื่องจากแรงดันอ้างอิงโดยปกติต้องการประมาณ 100mV จึงจำเป็นต้องมีตัวต้านทานต่ออนุกรม
กับตัวต้านทานอ้างอิงให้มีค่าเหมาะสมกับแต่ละสเกล ซึ่งจะต้องพิจารณาร่วมกับค่าความต้านทานที่จะวัดด้วยว่ามีค่าสูงสุดเท่าไร หลักการต่อวงจรตัวต้านทานต่างๆ เพื่อให้เกิดแรงดัน
อ้างอิงและแรงดันอินพุต เพื่อที่จะนำไปต่อกับโมดูลใหม่ของวงจร ซึ่งไม่ต้องการแรงดันอ้างอิงเดิม พิจารณาได้จากรูปที่ 6.14
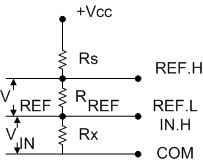 รูปที่ 6.14 แสดงการต่อตัวต้านทานต่างๆ เพื่อสร้างค่าแรงดันให้กับโมดูล
รูปที่ 6.14 แสดงการต่อตัวต้านทานต่างๆ เพื่อสร้างค่าแรงดันให้กับโมดูล
 รูปที่ 6.15 แสดงโมดูลดิจิตอลโอห์มมิเตอร์
จากรูปที่ 6.15 โมดูลของดิจิตอลโอห์มมิเตอร์ ซึ่งได้จากการดัดแปลงโมดูลของดิจิตอลโวลท์มิเตอร์ โดยการตัดวงจรในส่วนการสร้างแรงดันอ้างอิงออก แล้วนำขา REF.L ออก
จาก COM มาใช้งาน รวมทั้งขา REF.H ด้วย ส่วนอื่นๆของวงจรยังคงเหมือนเดิม
รูปที่ 6.15 แสดงโมดูลดิจิตอลโอห์มมิเตอร์
จากรูปที่ 6.15 โมดูลของดิจิตอลโอห์มมิเตอร์ ซึ่งได้จากการดัดแปลงโมดูลของดิจิตอลโวลท์มิเตอร์ โดยการตัดวงจรในส่วนการสร้างแรงดันอ้างอิงออก แล้วนำขา REF.L ออก
จาก COM มาใช้งาน รวมทั้งขา REF.H ด้วย ส่วนอื่นๆของวงจรยังคงเหมือนเดิม
ในการวัดค่าความต้านทานนั้น ถ้ามีแรงดันภายนอกค่าสูงมาตกคร่อมขั้วอินพุตตัวต้านทานมาตรฐานในวงจรอาจเสียหายได้ จึงนิยมใช้เทอร์มิสเตอร์ต่ออนุกรมระหว่างขา REF.L
และขา IN.H และซีเนอร์ไดโอด (ใช้ทรานซีสเตอร์แทนได้) ต่อระหว่างขา REF.L และขา COM ตามรูปที่ 6.16
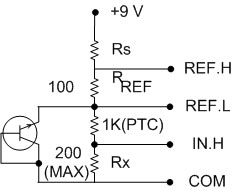 รูปที่ 6.16 แสดงวงจรวัดค่าความต้านทานที่มีการป้องกันแรงดันภายนอกสเกล 200W
เทอร์มิสเตอร์ที่ต่ออนุกรมเข้าไปมีสัมประสิทธิ์อุณหภูมิเป็นบวก ในภาวะปกติจะมีค่าความต้านทานต่ำประมาณ 1KW ถ้ามีแรงดันสูงๆ จากภายนอกเข้ามาที่อินพุต กระแสค่า
สูงจะไหลผ่านเทอร์มิสเตอร์และซีเนอร์ไดโอดไป ไม่ทำอันตรายตัวต้านทานมาตรฐานถ้าอุณหภูมิของเทอร์มิสเตอร์ร้อนถึงขนาดหนึ่ง จะเปลี่ยนค่าความต้านทานในตัวสูงขึ้น เป็นการ
ป้องกันอันตรายที่จะเกิดขึ้นกับเทอร์มิสเตอร์และซีเนอร์ไดโอด จากรูป จะเห็นว่าเทอร์มิสเตอร์ที่นำมาต่ออนุกรมกับตัวต้านทานมาตรฐาน จะไม่มีผลต่อการวัดค่าความต้านทาน เพราะ
การวัดค่าความต้านทานอาศัยอัตราส่วนของแรงดัน 2 ค่า คือแรงดันอิงที่เกิดจากตัวต้านทานมาตรฐานและแรงดันที่เกิดจากตัวต้านทานที่ต้องการวัด เนื่องจากแรงดันอินพุตสูงสุดที่วัด
ได้มีค่าเป็น 2 เท่าของแรงดันอ้างอิงดังนั้นค่าความต้านทานที่จะวัดจึง มีค่าสูงสุดเป็น 2 เท่าของตัวต้านทานมาตรฐาน เช่นสเกล 200W จะใช้ตัวต้านทานมาตรฐาน 100W จะวัดค่าตัว
ต้านทานสูงสุดได้ 200W (199.9 W)
รูปที่ 6.16 แสดงวงจรวัดค่าความต้านทานที่มีการป้องกันแรงดันภายนอกสเกล 200W
เทอร์มิสเตอร์ที่ต่ออนุกรมเข้าไปมีสัมประสิทธิ์อุณหภูมิเป็นบวก ในภาวะปกติจะมีค่าความต้านทานต่ำประมาณ 1KW ถ้ามีแรงดันสูงๆ จากภายนอกเข้ามาที่อินพุต กระแสค่า
สูงจะไหลผ่านเทอร์มิสเตอร์และซีเนอร์ไดโอดไป ไม่ทำอันตรายตัวต้านทานมาตรฐานถ้าอุณหภูมิของเทอร์มิสเตอร์ร้อนถึงขนาดหนึ่ง จะเปลี่ยนค่าความต้านทานในตัวสูงขึ้น เป็นการ
ป้องกันอันตรายที่จะเกิดขึ้นกับเทอร์มิสเตอร์และซีเนอร์ไดโอด จากรูป จะเห็นว่าเทอร์มิสเตอร์ที่นำมาต่ออนุกรมกับตัวต้านทานมาตรฐาน จะไม่มีผลต่อการวัดค่าความต้านทาน เพราะ
การวัดค่าความต้านทานอาศัยอัตราส่วนของแรงดัน 2 ค่า คือแรงดันอิงที่เกิดจากตัวต้านทานมาตรฐานและแรงดันที่เกิดจากตัวต้านทานที่ต้องการวัด เนื่องจากแรงดันอินพุตสูงสุดที่วัด
ได้มีค่าเป็น 2 เท่าของแรงดันอ้างอิงดังนั้นค่าความต้านทานที่จะวัดจึง มีค่าสูงสุดเป็น 2 เท่าของตัวต้านทานมาตรฐาน เช่นสเกล 200W จะใช้ตัวต้านทานมาตรฐาน 100W จะวัดค่าตัว
ต้านทานสูงสุดได้ 200W (199.9 W)
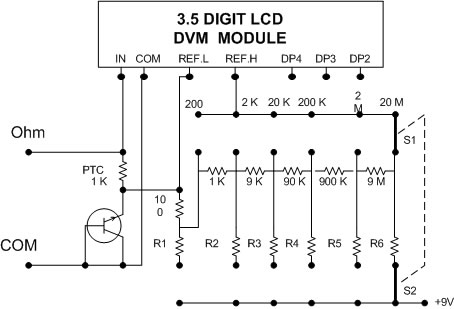 รูปที่ 6.17 แสดงวงจรวัดค่าความต้านทาน 0 – 20MW
การคำนวณตัวต้านทาน Rs ที่ต่ออนุกรมกับตัวต้านทานมาตรฐาน RRFE นั้นจะใช้เพียงค่าประมาณ โดยคำนึงถึงว่าแรงดันตกคร่อมตัวต้านทานมาตรฐาน ขณะวัดค่าความต้านทานภาย
นอกสูงสุดให้มีค่าประมาณ 100mV ซึ่งใกล้เคียงกับค่าที่ใช้กับโมดูลของดิจิตอลโวลท์มิเตอร์ โดยไม่มีผลต่อความผิดพลาดในการวัด เพราะว่าค่าความต้านทานได้จากสัดส่วนของค่า
ความต้านทานทั้งสอง
ตัวอย่าง จากรูปที่ 6.17 กำหนดแรงดันที่ขาแอนะลอกเทียบกับ +Vcc มีค่า 3.1V ต้องการแรงดันอ้างอิง 120mV ขณะวัดค่าความต้านทานสูงสุดในแต่ละสเกล จงคำ
นวณหาค่า R1, R2, R3, R4, R5, R6
วิธีทำ สำหรับสเกล 200W
ขณะวัดค่าความต้านทานภายนอก 200W เกิดแรงดันตกคร่อมตัวต้านทานมาตรฐาน 100W มีค่า 120mV
รูปที่ 6.17 แสดงวงจรวัดค่าความต้านทาน 0 – 20MW
การคำนวณตัวต้านทาน Rs ที่ต่ออนุกรมกับตัวต้านทานมาตรฐาน RRFE นั้นจะใช้เพียงค่าประมาณ โดยคำนึงถึงว่าแรงดันตกคร่อมตัวต้านทานมาตรฐาน ขณะวัดค่าความต้านทานภาย
นอกสูงสุดให้มีค่าประมาณ 100mV ซึ่งใกล้เคียงกับค่าที่ใช้กับโมดูลของดิจิตอลโวลท์มิเตอร์ โดยไม่มีผลต่อความผิดพลาดในการวัด เพราะว่าค่าความต้านทานได้จากสัดส่วนของค่า
ความต้านทานทั้งสอง
ตัวอย่าง จากรูปที่ 6.17 กำหนดแรงดันที่ขาแอนะลอกเทียบกับ +Vcc มีค่า 3.1V ต้องการแรงดันอ้างอิง 120mV ขณะวัดค่าความต้านทานสูงสุดในแต่ละสเกล จงคำ
นวณหาค่า R1, R2, R3, R4, R5, R6
วิธีทำ สำหรับสเกล 200W
ขณะวัดค่าความต้านทานภายนอก 200W เกิดแรงดันตกคร่อมตัวต้านทานมาตรฐาน 100W มีค่า 120mV


 = 1.28 KW
เพราะว่า R1 = 1.28 KW
ในทำนองเดียวกันสามารถคำนวณหาค่าต่างๆ ได้ดังนี้
R2 = 21.8KW
= 1.28 KW
เพราะว่า R1 = 1.28 KW
ในทำนองเดียวกันสามารถคำนวณหาค่าต่างๆ ได้ดังนี้
R2 = 21.8KW
R3 = 220KW
R4 = 2.28MW
R5 = 22.8MW
R6 = 228MW
การทำงานของดิจิตอลมัลติมิเตอร์
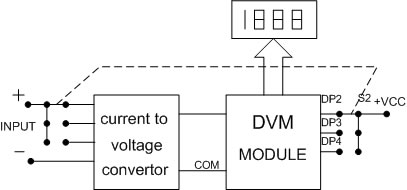
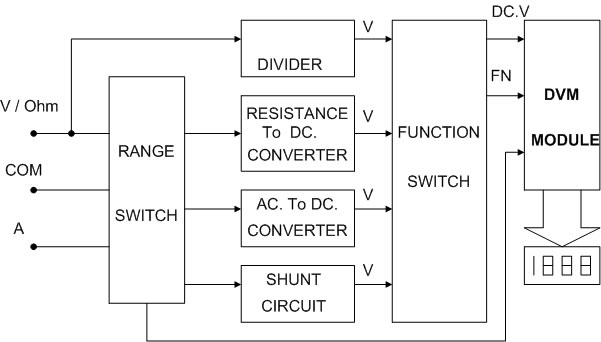 รูปที่ 6.18 แสดงโครงสร้างการทำงานของดิจิตอลมัลติมิเตอร์
การทำงานของดิจิตอลมัลติมิเตอร์ เป็นการเลือกฟังก์ชั่นการวัดค่าต่างๆ ตามวัตถุประสงค์ของการวัด เพื่อป้อนให้กับโมดูลของดิจิตอลโวลท์มิเตอร์ โดยดิจิตอลโวลท์มิเตอร์จะ
รวมวงจรต่างๆ เช่น วงจรแบ่งแรงดัน, วงจรเปลี่ยนค่าความต้านทานเป็นแรงดันไฟตรง, วงจรเปลี่ยนแรงดันไฟสลับป็นแรงดันไฟตรง, วงจรชันต์และอื่นๆ ไว้ให้เลือกใช้ การทำงานของ
สวิทซ์จะแบ่งเป็น 2 ส่วนคือ ส่วนที่ทำหน้าที่เลือกย่านวัด, จุดทศนิยม และส่วนที่ทำหน้าที่เลือกฟังก์ชั่น ซึ่งเป็นลักษณะของมัลติมิเตอร์แบบตั้งโต๊ะ ที่นิยมใช้เพราะมีการยแกส่วนที่
ชัดเจน แต่สำหรับมัลติมิเตอร์แบบพกพาจะนิยมออกแบบสวิทซ์ชนิดหมุนรอบตัวอาจมีฟังก์ชั่น AC - DC เพิ่มขึ้นกับการออกแบบใช้งาน อย่างไรก็ตามสวิทซ์ทั้งสองส่วนจะต้องมีความ
สัมพันธ์ที่ถูกต้องตามเงื่อนไขของการวัด
ข้อพิจารณาในการออกแบบดิจิตอลมัลติมิเตอร์
1.ควรเลือกใช้อุปกรณ์ต่างๆ ที่พอจะทดแทนกันได้ในวงจรต่างๆ ให้มากที่สุด เพื่อให้เกิดความประหยัด
2.ต้องคำนึงถึงการประหยัดกระแสไฟ เมื่อมีฟังก์ชั่นการทำงานที่ใช้อุปกรณ์แอกทีฟ ซึ่งต้องการกระแสใช้ในการทำงาน ถ้ากินกระแสหลายมิลิแอมป์ขึ้นไป อาจใช้สวิทซ์ตัด
ภาคจ่ายไฟโดยให้กินกระแสไฟขณะทำงานเท่านั้น
3.ต้องคำนึงถึงผลกระทบต่อการใช้กระแสไฟในฟังก์ชั่นต่างๆ ว่าให้แรงดันขาแอนะลอกร่วมลดลงหรือไม่ ซึ่งอาจมีผลต่อแรงดันอ้างอิงที่มีการปรับเพียงครั้งเดียว
4.สัญญาณรบกวนที่อาจมีผลกระทบต่อโมดูลของดิจิตอลโวลท์มิเตอร์ เนื่องจากฟังก์ชั่นการทำงาน ที่มีภาคกำเนิดสัญญาณความถี่
5.การป้องกันความเสียหายที่เกิดจากการวัดผิดพลาด เพื่อไม่ให้อุปกรณ์ภายในวงจรชำรุด เช่นฟิวส์, เทอร์มิสเตอร์, ซีเนอร์ไดโอด, สัญญาณเตือน ฯลฯ
6.ในการทดลองหรือประกอบเครื่องดิจิตอลมัลติมิเตอร์ จะต้องมีการชิลด์ป้องกันสนามแม่เหล็ก โดยเฉพาะที่ผ่านผู้ทำการทดลองไปยังวงจร เนื่องจากชิฟไอซี ที่ใช้เป็นชนิด
ซีมอส ซึ่งไวต่อสัญญาณรบกวนมาก ถ้าไม่มีแผ่นโลหะที่ต่อกับขาร่วมชิลด์ไว้ใต้แผ่นวงจรพิมพ์ จะทำให้ค่าที่วัดได้มีโอกาสผิดพลาด หรือค่าที่วัดได้วิ่งขึ้นลงไม่แน่นอน
รูปที่ 6.18 แสดงโครงสร้างการทำงานของดิจิตอลมัลติมิเตอร์
การทำงานของดิจิตอลมัลติมิเตอร์ เป็นการเลือกฟังก์ชั่นการวัดค่าต่างๆ ตามวัตถุประสงค์ของการวัด เพื่อป้อนให้กับโมดูลของดิจิตอลโวลท์มิเตอร์ โดยดิจิตอลโวลท์มิเตอร์จะ
รวมวงจรต่างๆ เช่น วงจรแบ่งแรงดัน, วงจรเปลี่ยนค่าความต้านทานเป็นแรงดันไฟตรง, วงจรเปลี่ยนแรงดันไฟสลับป็นแรงดันไฟตรง, วงจรชันต์และอื่นๆ ไว้ให้เลือกใช้ การทำงานของ
สวิทซ์จะแบ่งเป็น 2 ส่วนคือ ส่วนที่ทำหน้าที่เลือกย่านวัด, จุดทศนิยม และส่วนที่ทำหน้าที่เลือกฟังก์ชั่น ซึ่งเป็นลักษณะของมัลติมิเตอร์แบบตั้งโต๊ะ ที่นิยมใช้เพราะมีการยแกส่วนที่
ชัดเจน แต่สำหรับมัลติมิเตอร์แบบพกพาจะนิยมออกแบบสวิทซ์ชนิดหมุนรอบตัวอาจมีฟังก์ชั่น AC - DC เพิ่มขึ้นกับการออกแบบใช้งาน อย่างไรก็ตามสวิทซ์ทั้งสองส่วนจะต้องมีความ
สัมพันธ์ที่ถูกต้องตามเงื่อนไขของการวัด
ข้อพิจารณาในการออกแบบดิจิตอลมัลติมิเตอร์
1.ควรเลือกใช้อุปกรณ์ต่างๆ ที่พอจะทดแทนกันได้ในวงจรต่างๆ ให้มากที่สุด เพื่อให้เกิดความประหยัด
2.ต้องคำนึงถึงการประหยัดกระแสไฟ เมื่อมีฟังก์ชั่นการทำงานที่ใช้อุปกรณ์แอกทีฟ ซึ่งต้องการกระแสใช้ในการทำงาน ถ้ากินกระแสหลายมิลิแอมป์ขึ้นไป อาจใช้สวิทซ์ตัด
ภาคจ่ายไฟโดยให้กินกระแสไฟขณะทำงานเท่านั้น
3.ต้องคำนึงถึงผลกระทบต่อการใช้กระแสไฟในฟังก์ชั่นต่างๆ ว่าให้แรงดันขาแอนะลอกร่วมลดลงหรือไม่ ซึ่งอาจมีผลต่อแรงดันอ้างอิงที่มีการปรับเพียงครั้งเดียว
4.สัญญาณรบกวนที่อาจมีผลกระทบต่อโมดูลของดิจิตอลโวลท์มิเตอร์ เนื่องจากฟังก์ชั่นการทำงาน ที่มีภาคกำเนิดสัญญาณความถี่
5.การป้องกันความเสียหายที่เกิดจากการวัดผิดพลาด เพื่อไม่ให้อุปกรณ์ภายในวงจรชำรุด เช่นฟิวส์, เทอร์มิสเตอร์, ซีเนอร์ไดโอด, สัญญาณเตือน ฯลฯ
6.ในการทดลองหรือประกอบเครื่องดิจิตอลมัลติมิเตอร์ จะต้องมีการชิลด์ป้องกันสนามแม่เหล็ก โดยเฉพาะที่ผ่านผู้ทำการทดลองไปยังวงจร เนื่องจากชิฟไอซี ที่ใช้เป็นชนิด
ซีมอส ซึ่งไวต่อสัญญาณรบกวนมาก ถ้าไม่มีแผ่นโลหะที่ต่อกับขาร่วมชิลด์ไว้ใต้แผ่นวงจรพิมพ์ จะทำให้ค่าที่วัดได้มีโอกาสผิดพลาด หรือค่าที่วัดได้วิ่งขึ้นลงไม่แน่นอน